|
|
|
||||
|
|
|
||||
| Last modified on Thu Jun 11 21:38:41 2026 UTC. | Improve this page |
One of the early decisions during the design of a real-time application is how to partition the required functionality into separate tasks, such that each task is as simple as possible and has minimal interactions with the other tasks.
µOS++ makes it easy for an application programmer to adopt this paradigm. Each task is executed by a separate thread and can talk to other threads and to ISRs via various communication/synchronisation primitives.
A thread is a simple program that thinks it has the CPU all to itself. On a single CPU, only one thread can execute at any given time.
µOS++ supports multitasking and allows the application to have any number of threads. The maximum number of threads is actually only limited by the amount of memory (both code and data space) available to the processor.
Multitasking is the process of scheduling and switching the CPU between several threads. The CPU switches its attention between several threads. Multitasking provides the illusion of having multiple CPUs and, actually maximizes the use of the CPU.
Multitasking also helps in the creation of modular applications. Without multitasking, applications usually are a big superloop, which spins through one or several finite state machines. With multitasking, the application programmer has to manage much simpler, linear tasks. Application programs are typically easier to design and maintain when multitasking is used.
Separate threads are used for such chores as monitoring inputs, updating outputs, performing computations, control loops, update one or more displays, reading buttons and keyboards, communicating with other systems, and more. One application may contain a handful of threads while another application may require hundreds. The number of threads does not establish how good or effective a design may be, it really depends on what the application (or product) needs to do. The amount of work a thread performs also depends on the application. One thread may have a few microseconds worth of work to perform while another thread may require tens of milliseconds.
Tasks are implemented as regular C functions, passed to the thread creation calls as mandatory parameters.
There are two types of threads: run-to-completion and infinite loop. In most embedded systems, threads typically run as infinite loops.
As specified by POSIX, threads can terminate, and as such, µOS++ properly implements both run-to-completion and infinite loop threads.
Apart from having a specific prototype, thread functions are regular C function; as such they benefit from all C functions features, including having local variables on their own stacks, calling as many functions as they need, etc.
// Thread function.
void*
th_func(void* args)
{
// Define local variables, as needed.
// Do something useful.
// Consider args when multiple threads use the same function.
// When nothing to do, return.
return nullptr;
}
When a µOS++ thread begins executing, it is passed an optional void* argument, args. This pointer is a universal vehicle that can be used to pass to the thread the address of a variable, the address of a structure, or even the address of a function, if necessary. With this pointer, it is possible to create many identical threads, that all use the same reentrant thread body, but will be executed with different run-time data.
A reentrant function is a function that does not use static or otherwise global variables unless they are protected.
An example of a non-reentrant function is the famous strtok() provided by most C standard libraries. This function is used to parse strings for tokens. The first time this function is called, the string to parse and what constitute tokens must be specified. As soon as the function finds the first token, it returns. The function remembers where it was last so when called again, it can extract additional tokens, which is clearly non-reentrant. Most such functions were identified and reentrant versions are now available in standard libraries (in this case strtok_r()).
As an example of reentrant thread functions, one application may have four asynchronous serial ports that are each managed by their own thread. However, the thread functions are actually identical. Instead of copying the code four times, create the code for a “generic” thread that receives a pointer to a data structure, which contains the serial port’s parameters (baud rate, I/O port addresses, interrupt vector number, etc.) as an argument. In other words, instantiate the same thread code four times and pass it different data for each serial port that each instance will manage.
A µOS++ run-to-completion thread is implemented as a function that terminates and optionally returns a pointer. Alternatively it can explicitly call the this_thread::exit(void*), with identical results.
A run-to-completion thread starts, performs its function, and terminates. Later on such a thread can be reused as many times as necessary. However, there is a certain overhead involved with creating and destroying threads, and, if the thread is not configured to use a static stack, the stack area must be allocated and deallocated each time, which not only increases the overhead, but also may contribute to fragmentation.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
// Do something useful.
return nullptr;
}
int
os_main (int argc, char* argv[])
{
// ...
// Create the thread. Stack is dynamically allocated.
thread th { "th", th_func, nullptr };
// Wait for the thread to terminate.
th.join();
// ...
// The local thread is destroyed automatically before exiting this block.
return 0;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
// Thread function.
void*
th_func(void* args)
{
// Do something useful.
return NULL;
}
int
os_main (int argc, char* argv[])
{
// ...
// Local storage for the thread object instance.
os_thread_t th;
// Initialise the thread object and allocate the thread stack.
os_thread_construct(&th, "th", th_func, NULL, NULL);
// ...
// Wait for the thread to terminate.
os_thread_join(&th, NULL);
// ...
// For completeness, destroy the thread.
os_thread_destruct(&th);
return 0;
}
The use of an infinite loop threads is more common in embedded systems because of the repetitive work needed in such systems (reading inputs, updating displays, performing control operations, etc).
Note that one could use a while (true) or for (;;) to implement the infinite loop, since both behave the same.
The infinite loop must call a µOS++ service that will cause the thread to pass control back to the scheduler, for example a service to wait for an event to occur, or sleep for a certain duration. It is important that each thread will pass control back to the scheduler, otherwise the thread would be a true busy wait loop and will simply hog the CPU for the time quanta it is allowed to run. This concept of suspending waiting threads is key to an efficient CPU use in any RTOS.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
typedef struct msg_s
{
uint8_t id;
uint8_t payload[7];
} msg_t;
// Define a queue of 7 messages.
// The queue itself will be dynamically allocated.
message_queue_typed<msg_t> mq { 7 };
// Thread function.
void*
th_func(void* args)
{
while (true)
{
msg_t msg;
mq.receive(&msg);
trace::printf("id: %d\n", msg.id);
}
return nullptr;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
typedef struct msg_s
{
uint8_t id;
uint8_t payload[7];
} msg_t;
// Global static storage for the queue object instance.
// The queue itself will be dynamically allocated.
os_mqueue_t mq;
// Thread function.
void*
th_func(void* args)
{
while (true)
{
msg_t msg;
os_mqueue_receive(&mq, &msg, sizeof(msg), NULL);
trace_printf("id: %d\n", msg.id);
}
return NULL;
}
The µOS++ service used in this example to pass control back to the scheduler is the queue receive function. The thread will have nothing to do until the message is received. Once a message is send to the queue, the thread will be resumed and the message consumed.
Another common situation the thread might be waiting for is the passage of time. For example, a design may need to scan a keyboard every 100 ticks. In this case, simply delay the thread for 100 ticks (sysclock.sleep_for(100)) then see if a key was pressed on the keyboard and, possibly perform some action based on which key was pressed.
It’s important to note that when a thread is suspended and waits for an event, it does not consume any CPU time.
The rules used by the µOS++ scheduler to select the next thread are simple:
In short, this can be rephrased as:
The oldest thread with the highest priority.
Thread priorities are unsigned values, with higher values meaning higher priorities.
µOS++ imposes no restrictions on how priorities can be assigned to threads. The choice can be anything from assigning a unique priority to every thread (as required by some special scheduling strategies), to assigning the same priority to all threads. By default, all threads are created with the normal priority.
Creating threads is probably the most complex part of any RTOS API, and it is unfortunate that this is usually one of the first issues encountered when dealing with a new RTOS, but threads must be mastered as soon as possible as they are a fundamental component of multitasking systems.
For convenience reasons, µOS++ has a rich set of functions for creating threads. Threads can use either statically or dynamically allocated stacks, threads can be created as local objects on the function stack, or as global objects, threads can be created with default characteristics or with custom attributes, and so on.
For infinite loop threads, the easiest way to create threads is to make them global objects.
In C++, the global threads are created and initialised by the global static constructors mechanism, so they are already linked in the READY list when main() is executed.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
#include <my-allocator.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return nullptr;
}
// Create a thread; the stack is allocated with the default RTOS allocator.
thread th1 { "th1", th_func, nullptr };
// Define a custom thread type, parametrised with the user allocator.
using my_allocated_thread = thread_allocated<my_allocator>;
// Create a thread; the stack is allocated with the user allocator.
my_allocated_thread th2 { "th2", th_func, nullptr };
constexpr std::size_t my_stack_size_bytes = 3000;
// Create a thread; the stack is included in the definition.
thread_inclusive<my_stack_size_bytes> th3 { "th3", th_func, nullptr };
int
os_main (int argc, char* argv[])
{
// ...
// Not much to do, the threads were created by the static
// constructors, before entering main(), and are already running.
// ...
// Wait for the threads to terminate.
th1.join();
th2.join();
th3.join();
return 0;
}
// All threads are automatically destroyed if os_main() returns.
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
#include <my-allocator.h>
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return NULL;
}
// Global static storage for the thread object instance.
os_thread_t th1;
// Global static storage for the thread object instance.
os_thread_t th2;
#define MY_STACK_SIZE_BYTES 3000
// Static storage for the thread stack.
os_thread_stack_allocation_element_t
th3_stack[MY_STACK_SIZE_BYTES/sizeof(os_thread_stack_allocation_element_t)];
// Global static storage for the thread object instance.
os_thread_t th3;
int
os_main (int argc, char* argv[])
{
// ...
// Create a thread; the stack is allocated with the default RTOS allocator.
os_thread_construct(&th1, "th1", th_func, NULL, NULL);
// The default stack size.
size_t my_size = os_thread_stack_get_default_size();
os_thread_attr_t attr2;
os_thread_attr_init(&attr2);
attr2.th_stack_address = my_allocator_allocate(my_size);
attr2.th_stack_size_bytes = my_size;
// Create a thread; the stack is allocated with the user allocator.
os_thread_construct(&th2, "th2", th_func, NULL, &attr2);
os_thread_attr_t attr3;
os_thread_attr_init(&attr3);
attr3.th_stack_address = th3_stack;
attr3.th_stack_size_bytes = sizeof(th3_stack);
// Create a thread; the stack is allocated with the user allocator.
os_thread_construct(&th3, "th3", th_func, NULL, &attr3);
// ...
// Wait for the threads to terminate.
os_thread_join(&th1, NULL);
os_thread_join(&th2, NULL);
os_thread_join(&th3, NULL);
// For completeness, destroy the threads.
os_thread_destruct(&th1);
os_thread_destruct(&th2);
os_thread_destruct(&th3);
// Free the allocated stack.
my_allocator_deallocate(attr2.th_stack_address, attr2.th_stack_size_bytes);
return 0;
}
In C++, if it is necessary to control the moment when global objects instances are created, it is possible to separately allocate the storage as global variables, then use the placement new operator to initialise them.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
#include <my-allocator.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return nullptr;
}
// Global static storage for the thread object instance.
// This storage is set to 0 as any uninitialised variable.
std::aligned_storage<sizeof(thread), alignof(thread)>::type th1;
int
os_main (int argc, char* argv[])
{
// ...
// Use placement new, to explicitly call the constructor
// and initialise the thread.
new (&th1) thread { "th1", th_func, nullptr };
// Local static storage for the thread object instance.
std::aligned_storage<sizeof(thread), alignof(thread)>::type th2;
// Use placement new, to explicitly call the constructor
// and initialise the thread.
new (&th2) thread { "th2", th_func, nullptr };
// ...
// Wait for the thread to terminate.
th1.join();
// For completeness, call the threads destructors, which for placement new
// is no longer called automatically.
reinterpret_cast<os::rtos::thread&>(th1).~thread();
reinterpret_cast<os::rtos::thread&>(th2).~thread();
return 0;
}
Threads objects instances can also be created on the local stack, for example on the main thread stack. Just be sure the stack is large enough to store all defined local objects.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
#include <my-allocator.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return nullptr;
}
constexpr std::size_t my_stack_size_bytes = 3000;
thread::stack::allocation_element_t
th3_stack[my_stack_size_bytes/sizeof(thread::stack::allocation_element_t)];
int
os_main (int argc, char* argv[])
{
// ...
// Create a thread; the stack is allocated with the default RTOS allocator.
thread th1 { "th1", th_func, nullptr };
// Define a custom thread type, parametrised with the user allocator.
using my_allocated_thread = thread_allocated<my_allocator>;
// Create a thread; the stack is allocated with the user allocator.
my_allocated_thread th2 { "th2", th_func, nullptr };
thread::attributes attr;
attr.th_stack_address = th3_stack;
attr.th_stack_size_bytes = sizeof(th3_stack);
// Create a thread; the stack is statically allocated.
thread th3 { "th3", th_func, nullptr, attr };
// Beware of local static instances, since they'll use atexit()
// to register the destructor; avoid and prefer placement new, as before.
// static thread th4 { "th4", th_func, nullptr };
// ...
// Wait for the threads to terminate.
th1.join();
th2.join();
th3.join();
// The local threads are destroyed automatically before exiting this block.
return 0;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
#include <my-allocator.h>
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return NULL;
}
#define MY_STACK_SIZE_BYTES 3000
// Static storage for the thread stack.
os_thread_stack_allocation_element_t
th3_stack[MY_STACK_SIZE_BYTES/sizeof(os_thread_stack_allocation_element_t)];
int
os_main (int argc, char* argv[])
{
// ...
// Local storage for the thread object instance.
os_thread_t th1;
// Create a thread; the stack is allocated with the default RTOS allocator.
os_thread_construct(&th1, "th1", th_func, NULL, NULL);
// The default stack size.
size_t my_size = os_thread_stack_get_default_size();
os_thread_attr_t attr2;
os_thread_attr_init(&attr2);
attr2.th_stack_address = my_allocator_allocate(my_size);
attr2.th_stack_size_bytes = my_size;
// Local storage for the thread object instance.
os_thread_t th2;
// Create a thread; the stack is allocated with the user allocator.
os_thread_construct(&th2, "th2", th_func, NULL, &attr2);
os_thread_attr_t attr3;
os_thread_attr_init(&attr3);
attr3.th_stack_address = th3_stack;
attr3.th_stack_size_bytes = sizeof(th3_stack);
// Local storage for the thread object instance.
os_thread_t th3;
// Create a thread; the stack is statically allocated.
os_thread_construct(&th3, "th3", th_func, NULL, &attr3);
// ...
// Wait for the threads to terminate.
os_thread_join(&th1, NULL);
os_thread_join(&th2, NULL);
os_thread_join(&th3, NULL);
// Free the allocated stack.
my_allocator_deallocate(attr2.th_stack_address, attr2.th_stack_size_bytes);
// For completeness, destroy the threads.
os_thread_destruct(&th1);
os_thread_destruct(&th2);
os_thread_destruct(&th3);
return 0;
}
The application programmer can create an unlimited number of threads (limited only by the available RAM).
The 2011 release of the ISO/IEC C++ 14882 standard finally introduced a standard definition for the C++ threads objects.
This standard definition was designed with POSIX threads in mind, and the standard C++ threads do not intend to reimplement the POSIX threads in C++, but are seen as a C++ wrapper on top of the existing C POSIX threads.
With µOS++ threads being a C++ reimplementation of the POSIX threads, the ISO/IEC wrapper approach matches almost 1:1 the native µOS++ threads.
To avoid clashes with the standard library when running tests on synthetic platforms that already implement the C++ standard threads, the µOS++ definitions are part of the os::estd:: namespace (“embedded” std), instead of the std:: namespace.
When using the os::estd:: namespace it is recommended to avoid using namespace definitions below the os namespace; instead, use the rtos and estd namespaces explicitly.
/// @file app-main.cpp
#include <cmsis-plus/est/thread>
using namespace os;
// Thread function.
void*
th_func(int n, char* s, void* p)
{
// Note the 3 different parameters.
// Do something useful.
return nullptr;
}
int
os_main (int argc, char* argv[])
{
// ...
// Create a standard thread.
// The underlying implementation thread object and
// stack are dynamically allocated.
estd::thread th1 { th_func, 7, "str", nullptr };
// ...
// Wait for the thread to terminate.
th1.join();
// The local thread is destroyed automatically before exiting this block.
return 0;
}
The expected standard implementation dynamically allocates the underlying rtos::thread object instance, which in turn allocates the stack; it is not possible to configure static stacks with ISO C++ threads, neither to set a name for the thread.
To be noted that standard C++ threads can have any number of arguments. The internal implementation uses tuples and std::bind, which also imply a dynamic memory allocation.
For more details, please read the ISO/IEC 14882:2011(E), Programming Languages – C++ specifications.
By default, threads are created with thread::priority::normal which is a middle value priority, but it can be changed at any moment during the thread lifetime.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
this_thread::thread().priority(thread::priority::high);
// Do something useful.
return nullptr;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
// Thread function.
void*
th_func(void* args)
{
os_thread_set_priority(os_this_thread(), os_thread_priority_high);
// Do something useful.
return NULL;
}
If, for any reasons, the initial thread priority must be different, it can be set to any legal value during the thread creation call, using the th_priority thread attribute.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
#include <my-allocator.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return nullptr;
}
int
os_main (int argc, char* argv[])
{
// ...
thread::attributes attr;
attr.th_priority = thread::priority::high;
// Create a thread; the stack is allocated with the default RTOS allocator.
// The initial priority is configured via the attributes as HIGH.
thread th1 { "th1", th_func, nullptr, attr };
// ...
// Wait for the thread to terminate.
th1.join();
// The local thread is destroyed automatically before exiting this block.
return 0;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
#include <my-allocator.h>
// Thread function.
void*
th_func(void* args)
{
while (true)
{
// Do something useful.
}
return NULL;
}
int
os_main (int argc, char* argv[])
{
// ...
os_thread_attr_t attr;
os_thread_attr_init(&attr);
attr.th_priority = os_thread_priority_high;
// Local storage for the thread object instance.
os_thread_t th1;
// Create a thread; the stack is allocated with the default RTOS allocator.
// The initial priority is configured via the attributes as HIGH.
os_thread_construct(&th1, "th1", th_func, NULL, &attr);
// ...
// Wait for the thread to terminate.
os_thread_join(&th1, NULL);
// For completeness, destroy the thread.
os_thread_destruct(&th1);
return 0;
}
The µOS++ thread API basically implements the POSIX threads, with several extensions.
The thread name is an optional string defined during thread object instance creation. It is generally used to identify the thread during debugging sessions.
The C++ API is:
thread th { "th", th_func, nullptr };
const char* name = th.name();
The C API is:
os_thread_t th;
os_thread_construct(&th, "th", th_func, NULL, NULL };
const char* name = os_thread_get_name(&th);
The thread priority can be accessed and modified by the thread itself, or by another thread.
The C++ API is:
thread th { "th", th_func, nullptr };
thread::priority_t prio = th.priority();
th.priority(thread::priority::high);
The C API is:
os_thread_t th;
os_thread_construct(&th, "th", th_func, NULL, NULL };
os_thread_priority_t prio = os_thread_get_priority(&th);
os_thread_set_priority(&th, os_thread_priority_high);
The thread::stack is a separate object, managing the thread stack; the stack storage itself is not included in this object, but only a pointer to it is available.
The C++ API is:
thread th { "th", th_func, nullptr };
thread::stack& stack = th.stack();
std::size_t sz = stack.size();
std::size_t available = stack.available();
stack::element_t* bottom = stack.bottom();
stack::element_t* top = stack.top();
bool bm = stack.check_bottom_magic();
bool tm = stack.check_top_magic();
The C API is:
os_thread_t th;
os_thread_construct(&th, "th", th_func, NULL, NULL };
os_thread_stack_t* stack = os_thread_get_stack(&th);
size_t sz = os_thread_stack_get_size(stack);
size_t available = os_thread_stack_get_available(stack);
os_thread_stack_element_t* bottom = os_thread_stack_get_bottom(stack);
os_thread_stack_element_t* top = os_thread_stack_get_top(stack);
bool bm = os_thread_stack_check_bottom_magic(stack);
bool tm = os_thread_stack_check_top_magic(stack);
The thread user storage is a user defined structure added to each thread storage.
The C++ API is:
thread th { "th", th_func, nullptr };
os_thread_user_storage_t* p = th.user_storage();
A similar example, but written in C:
os_thread_t th;
os_thread_construct(&th, "th", th_func, NULL, NULL };
os_thread_user_storage_t* p = os_thread_get_user_storage(&th);
The content of os_thread_user_storage_t must be defined in os-app-config.h, together with OS_INCLUDE_RTOS_CUSTOM_THREAD_USER_STORAGE, which enables the user storage feature.
For error processing purposes, it is sometimes useful for a monitoring thread to be able to interrupt another thread blocked in a waiting functions.
For this purpose, each thread has an “interrupted” flag, that can be set/reset and checked.
When this flag is set, the thread is resumed and the blocking function, if written carefully, should check this flag and return EINTR.
After detecting the EINTR condition, the interrupted thread must clear the flag, with thread::interrupt(false) (in C os_thread_set_interrupt(false)).
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
// Thread function.
void*
th_func(void* args)
{
// Block on a long sleep.
result_t res = sysclock.sleep_for(99999999);
if (res == EINTR)
{
this_thread::thread().interrupt(false);
}
return nullptr;
}
int
os_main (int argc, char* argv[])
{
// ...
// Create a thread; the stack is allocated with the default RTOS allocator.
// The initial priority is configured via the attributes as HIGH.
thread th1 { "th1", th_func, nullptr, nullptr };
// Request for thread interruption.
th1.interrupt();
// ...
// Wait for the thread to terminate.
th1.join();
// The local thread is destroyed automatically before exiting this block.
return 0;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
// Thread function.
void*
th_func(void* args)
{
// Block on a long sleep.
os_result_t res = os_sysclock_sleep_for(99999999);
if (res == EINTR)
{
os_thread_interrupt(os_this_thread(), false);
}
return NULL;
}
int
os_main (int argc, char* argv[])
{
// ...
// Local storage for the thread object instance.
os_thread_t th1;
// Create a thread; the stack is allocated with the default RTOS allocator.
// The initial priority is configured via the attributes as HIGH.
os_thread_construct(&th1, "th1", th_func, NULL, &attr);
// Request for thread interruption.
os_thread_interrupt(&th1, true);
// ...
// Wait for the thread to terminate.
os_thread_join(&th1, NULL);
// For completeness, destroy the thread.
os_thread_destruct(&th1);
return 0;
}
If for infinite loop threads this is not an issue, since they are never destroyed, for run-to-completion threads it is important to properly terminate them, to ensure all resources are released.
There are several ways of terminating a thread:
this_thread::exit()
this_thread::exit()
thread::kill()
os_thread_destruct() must be manually invoked).All these methods are functionally equivalent, in that the thread is destroyed, and, if the thread stack was dynamically allocated, this storage is automatically deallocated.
There is a subtle difference when the thread decides to terminate itself (by calling exit() or returning from the thread function, which is exactly the same): the thread termination can proceed only up to a point, but cannot complete the stack deallocation while still using the stack. To solve this, in µOS++ the thread adds itself to a list that will be later processed by the idle thread, and, by the next time idle is scheduled, the stack will be deallocated and the thread destruction will be finalised.
In a well behaved system this is not a problem, because the idle thread is scheduled quite often, but in a busy system it might take some time.
If the thread is needed for immediate reuse, it is recommended for the parent thread to invoke thread::kill(), which will destroy the thread on the spot, without having to wait for idle to act as a hitman.
Some thread functions (like suspend()) can be performed only on the current thread, in other words one thread cannot suspend another, only the thread itself can do it.
To access these special functions, in C++, a dedicated namespace this_thread is used (in C a family of functions prefixed with os_this_thread_ is defined).
For more specific functions, a reference to the current thread can be obtained with this_thread::thread() (in C with os_this_thread());
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
// A thread function.
void*
th_func(void* args)
{
trace::printf("Thread name: %s\n", this_thread::thread().name());
// Do something.
return nullptr;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
// A thread function.
void*
th_func(void* args)
{
trace_printf("Thread name: %s\n", os_thread_name(os_this_thread());
// Do something.
return NULL;
}
A thread may be in one of several states at any given time. The main distinction is based on the presence of the thread in the READY list; a thread in the READY list is said to be in the ready state.
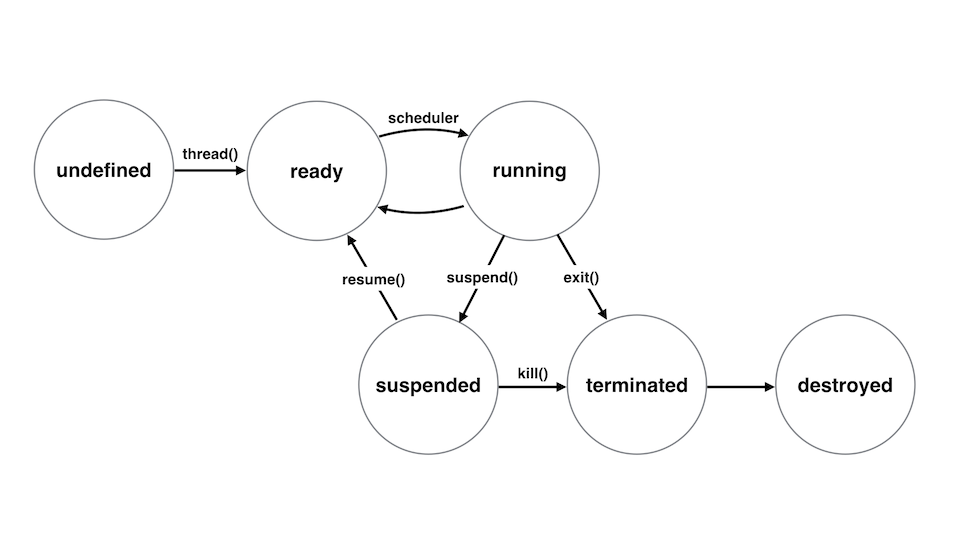
The memory area associated with a not-yet-created thread may have any content, and the thread is considered to be in the undefined state.
When a thread is created, it is placed into the ready state.
When threads become ready-to-run, they are inserted in the READY list and at the same time are placed in the ready state.
At the next scheduling point, the oldest high-priority ready thread gets the CPU and is placed in the running state.
Only one thread may be running at a time. If a thread with higher priority becomes ready, the current running thread is preempted and moved back in the ready state; the higher priority thread becomes the running thread.
The running thread may found itself having nothing else to do for the moment; in this case it is placed into the suspended state and the next-highest-priority thread in the ready state is activated.
When threads are removed from the READY list, they are placed in the suspended state.
Internally, µOS++ has a single function to suspend a thread (this_thread::suspend()), and it does not differentiate between suspended states; it makes no difference if the thread is suspended to wait for a mutex to become unlocked, for a software timer to expire or for a timeout to break a wait.
In the public APIs, all waiting functions, with or without timeouts, are implemented on top of the this_thread::suspend() function (actually on the internal port::scheduler::reschedule() used to implement this_thread::suspend() too).
The scheduler itself does not keep track of the suspended threads. It is the responsibility of the synchronisation objects that suspended the thread to link it to the specific object (mutex, semaphore, etc) waiting list, and possibly to the clock timeout list.
µOS++ has a single function to resume a thread (thread::resume()), and it makes no difference why the thread was suspended for, it is resumed and placed in the ready state anyway.
When a thread is terminated, it is first put in the terminated state, and after resources associated to it are released, it is put in the destroyed state.
The thread’s stack has the same function as in a single-thread system: storage of return addresses of nested function calls, parameters and local variables, and temporary storage of intermediate results and register values.
Each thread has its own stack, with a fixed size determined during thread creation, and each thread has its own stack usage pattern. It is very difficult to compute the exact stack space required by a thread, especially when recursive algorithms are used.
What most users do, is to start with some reasonable values, and adjust them if needed.
µOS++ provides support for computing the thread stack available space, and a user defined monitoring mechanism can invoke it and detect low stack conditions.
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
// A thread function.
void*
th_func(void* args)
{
// Do something.
// Check stack.
thread::stack& st = this_thread::thread().stack();
std::size_t available = st.available();
if (available < (st.size() * 20 / 100))
{
trace::printf("Low stack!\n");
}
// Do something.
return nullptr;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
// A thread function.
void*
th_func(void* args)
{
// Do something.
// Check stack.
os_thread_stack_t* st = os_thread_get_stack(os_this_thread());
size_t available = os_thread_stack_get_available(st);
if (available < (os_thread_stack_get_size() * 20 / 100))
{
trace_printf("Low stack!\n");
}
// Do something.
return NULL;
}
Note: For reentrancy reasons, the trace::printf() facility requires some stack space for its internal buffers, space that must be added to the effective space required by the application; for Cortex-M applications running in debugging mode, a stack of 2000 bytes is a good starting point.
The stack size can be specified during creation time for each thread, using the th_stack_size_bytes thread attribute. If attributes are not used, or the provided value is zero, a default value is supplied.
This default value can be set at any time using thread::stack::default_size(std::size_t) (in C with os_thread_stack_set_default_size(size_t)), and applies to all threads created afterwords.
The initial value of the default stack size can be set during compile time with OS_INTEGER_RTOS_DEFAULT_STACK_SIZE_BYTES.
For validation purposes, the thread creation code validates the thread stack size to be above a minimum value.
This value can be set at any time using thread::stack::min_size(std::size_t) (in C with os_thread_stack_set_min_size(size_t)), and applies to all threads created afterwords.
The initial value of the minimum stack size is defined by the port, but can be set during compile time with OS_INTEGER_RTOS_MIN_STACK_SIZE_BYTES.
The recommended location to set these defaults is at the beginning of the os_main() function:
/// @file app-main.cpp
#include <cmsis-plus/rtos/os.h>
using namespace os;
using namespace os::rtos;
int
os_main (int argc, char* argv[])
{
// ...
thread::stack::min_size(1000);
thread::stack::default_size(2500);
// ...
return 0;
}
A similar example, but written in C:
/// @file app-main.c
#include <cmsis-plus/rtos/os-c-api.h>
int
os_main (int argc, char* argv[])
{
// ...
os_thread_stack_set_min_size(1000);
os_thread_stack_set_default_size(2500);
// ...
return 0;
}
Except when using the thread_inclusive template, by default threads are created with a dynamically allocated stack. This can be changed to a user defined stack using the th_stack_address and th_stack_size_bytes thread attributes.
thread::attributes attr;
attr.th_stack_address = th3_stack;
attr.th_stack_size_bytes = sizeof(th3_stack);
// Create a thread; the stack is statically allocated.
thread th3 { "th3", th_func, nullptr, attr };
A similar example, but written in C:
os_thread_attr_t attr3;
os_thread_attr_init(&attr3);
attr3.th_stack_address = th3_stack;
attr3.th_stack_size_bytes = sizeof(th3_stack);
// Local storage for the thread object instance.
os_thread_t th3;
// Create a thread; the stack is statically allocated.
os_thread_construct(&th3, "th3", th_func, NULL, &attr3);
Accurate stack overflow detection requires hardware support, not available on common Cortex-M devices.
Although not bullet proof, since it does not prevent the stack to overflow, but can tell if this event happened, is a software method, which stores a magic word at the bottom of the stack, and periodically checks it.
µOS++ uses this method, and checks the stack during each context switches; an assert stack ().check_bottom_magic () is triggered in the thread::_relink_running() function if the stack overflow damaged the magic word.
The idle thread is a mandatory internal component of µOS++. It is the lowest priority thread, always ready to run when no other threads are active. The initialisation code always creates the idle thread, way before the scheduler is started.
The idle thread manages a list of threads terminated and waiting to be destroyed. The thread::exit() call links the terminating thread to this list, since it cannot destroy the thread while still running on the thread stack.
When the idle thread is resumed, it first checks this list, and, if any threads are present, they are fully destroyed and possibly the stack space is deallocated.
When the idle thread has nothing else to do, it places the CPU into sleep, and waits for the next interrupt (the Cortex-M devices use the Wait For Interrupt - WFI instruction for this).
If needed, the idle thread stack size can be configured during compile time with OS_INTEGER_RTOS_IDLE_STACK_SIZE_BYTES.
The main thread is an optional internal component of µOS++. If the main() function is not defined by the application, a weak default version of it is provided by µOS++.
This default main() function creates an initial thread called exactly main, with normal priority, that is configured to start the user-provided function os_main(int argc, char* argv[]) as the thread function.
If needed, the main thread stack size can be configured during compile time with OS_INTEGER_RTOS_MAIN_STACK_SIZE_BYTES.
