|
µOS++ IIIe Reference 7.0.0
The third edition of µOS++, a POSIX inspired open source framework, written in C++
|
|
µOS++ IIIe Reference 7.0.0
The third edition of µOS++, a POSIX inspired open source framework, written in C++
|
Adjustable (non-steady) clock. More...
#include <cmsis-plus/rtos/os.h>
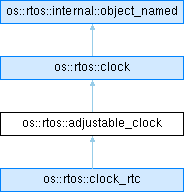
 Inheritance diagram for os::rtos::adjustable_clock:
Inheritance diagram for os::rtos::adjustable_clock:Public Types | |
Types & Constants | |
| using | duration_t = port::clock::duration_t |
| Type of variables holding clock durations. | |
| using | timestamp_t = port::clock::timestamp_t |
| Type of variables holding clock time stamps. | |
| using | offset_t = port::clock::offset_t |
| Type of variables holding clock offsets. | |
Public Member Functions | |
Constructors & Destructor | |
| virtual | ~adjustable_clock () override |
| Destruct the clock object instance. | |
Public Member Functions | |
| virtual timestamp_t | now (void) override |
| Tell the current time adjusted for epoch. | |
| virtual result_t | sleep_until (timestamp_t timestamp) override |
| Sleep until an absolute timestamp. | |
| virtual offset_t | offset (void) override |
| Get adjustment offset. | |
| virtual offset_t | offset (offset_t value) override |
| Set adjustment offset. | |
| void | internal_check_timestamps (void) |
Public Member Functions | |
| virtual void | start (void)=0 |
| Start the clock. | |
| timestamp_t | steady_now (void) |
| Tell the current time since startup. | |
| result_t | sleep_for (duration_t duration) |
| Sleep for a relative duration. | |
| result_t | wait_for (duration_t timeout) |
| Timed wait for an event. | |
| timestamp_t | update_for_slept_time (duration_t duration) |
| Increase the internal count after a deep sleep. | |
Public Member Functions | |
| const char * | name (void) const |
| Get object name. | |
Definition at line 325 of file os-clocks.h.
|
overridevirtual |
| void os::rtos::adjustable_clock::internal_check_timestamps | ( | void | ) |
Referenced by os_rtc_handler().
|
inlineinherited |
All objects return a non-null string; anonymous objects return "-".
Definition at line 753 of file os-decls.h.
Referenced by os::memory::lifo::lifo(), os::memory::malloc_memory_resource::malloc_memory_resource(), os::rtos::message_queue_typed< T, Allocator >::message_queue_typed(), os::memory::block_pool::~block_pool(), os::rtos::event_flags::~event_flags(), os::memory::first_fit_top::~first_fit_top(), os::memory::lifo::~lifo(), os::memory::malloc_memory_resource::~malloc_memory_resource(), os::rtos::memory_pool::~memory_pool(), os::rtos::message_queue::~message_queue(), os::rtos::mutex::~mutex(), os::rtos::semaphore::~semaphore(), os::rtos::thread::~thread(), os::rtos::timer::~timer(), os::rtos::memory_pool::alloc(), os::rtos::thread::cancel(), os::rtos::event_flags::clear(), os::rtos::mutex::consistent(), os::rtos::thread::detach(), os::memory::new_delete_memory_resource::do_allocate(), os::memory::block_pool::do_allocate(), os::memory::first_fit_top::do_allocate(), os::memory::lifo::do_allocate(), os::memory::malloc_memory_resource::do_allocate(), os::rtos::thread::flags_raise(), os::rtos::memory_pool::free(), os::rtos::event_flags::get(), os::rtos::thread::interrupt(), os::rtos::thread::join(), os::rtos::thread::kill(), os::rtos::internal::terminated_threads_list::link(), os::rtos::mutex::lock(), os::rtos::memory::memory_resource::out_of_memory_handler(), os::rtos::semaphore::post(), os::rtos::mutex::prio_ceiling(), os::rtos::mutex::prio_ceiling(), os::rtos::thread::priority(), os::rtos::thread::priority_inherited(), os::rtos::event_flags::raise(), os::rtos::message_queue::receive(), os::rtos::memory_pool::reset(), os::rtos::message_queue::reset(), os::rtos::mutex::reset(), os::rtos::semaphore::reset(), os::rtos::thread::resume(), os::rtos::message_queue::send(), os::rtos::clock::sleep_for(), os::rtos::timer::start(), os::rtos::timer::stop(), os::rtos::memory_pool::timed_alloc(), os::rtos::mutex::timed_lock(), os::rtos::message_queue::timed_receive(), os::rtos::message_queue::timed_send(), os::rtos::semaphore::timed_wait(), os::rtos::event_flags::timed_wait(), os::rtos::memory::memory_resource::trace_print_statistics(), os::rtos::memory_pool::try_alloc(), os::rtos::mutex::try_lock(), os::rtos::message_queue::try_receive(), os::rtos::message_queue::try_send(), os::rtos::event_flags::try_wait(), os::rtos::semaphore::try_wait(), os::rtos::internal::ready_threads_list::unlink_head(), os::rtos::mutex::unlock(), os::rtos::event_flags::wait(), os::rtos::semaphore::wait(), and os::rtos::event_flags::waiting().
|
overridevirtual |
Reimplemented from os::rtos::clock.
Referenced by __posix_gettimeofday(), and os::estd::chrono::realtime_clock::now().
| [in] | value | Integer representing the offset to epoch (positive). |
Reimplemented from os::rtos::clock.
|
overridevirtual |
Reimplemented from os::rtos::clock.
|
inherited |
| [in] | duration | The number of clock units (ticks or seconds) to sleep. |
| ETIMEDOUT | The sleep lasted the entire duration. |
| EPERM | Cannot be invoked from an Interrupt Service Routines. |
| EINTR | The sleep was interrupted. |
Definition at line 175 of file os-clocks.cpp.
References os::rtos::interrupts::in_handler_mode(), os::rtos::scheduler::locked(), os::rtos::internal::object_named::name(), os::rtos::result::ok, os_assert_err, os::trace::printf(), os::rtos::clock::steady_now(), and os::rtos::this_thread::thread().
Referenced by os_sysclock_sleep_for(), and osDelay().
|
overridevirtual |
| [in] | timestamp | The absolute moment in time, in clock units. |
| ETIMEDOUT | The sleep lasted the entire duration. |
| EPERM | Cannot be invoked from an Interrupt Service Routines. |
| EINTR | The sleep was interrupted. |
Reimplemented from os::rtos::clock.
|
pure virtualinherited |
For system clocks it is called from the system startup code.
Implemented in os::rtos::clock_systick, os::rtos::clock_rtc, and os::rtos::clock_highres.
Definition at line 139 of file os-clocks.cpp.
|
inherited |
Definition at line 161 of file os-clocks.cpp.
Referenced by os::rtos::clock::sleep_for(), and os::rtos::clock::wait_for().
|
inherited |
| duration | Number of ticks lost during sleep. |
During deep sleep the interrupts used to count clock ticks are usually disabled and an external RTC is configured to wake-up the device, so a number of clock ticks are lost.
To keep the clocks accurate, it is recommended to sample the external RTC before entering deep sleep and again when the device is back to life, compute the time slept as difference, and use this function to update the internal clock counter.
Definition at line 315 of file os-clocks.cpp.
|
inherited |
| [in] | timeout | The timeout in clock units. |
| result::ok | An event occurred before the timeout. |
| ETIMEDOUT | The wait lasted the entire duration. |
| EPERM | Cannot be invoked from an Interrupt Service Routines. |
| EINTR | The sleep was interrupted. |
Definition at line 264 of file os-clocks.cpp.
References os::rtos::interrupts::in_handler_mode(), os::rtos::scheduler::locked(), os_assert_err, os::trace::printf(), os::rtos::clock::steady_now(), and os::rtos::this_thread::thread().
Referenced by os_sysclock_wait_for().